Mechanical Design Engineer
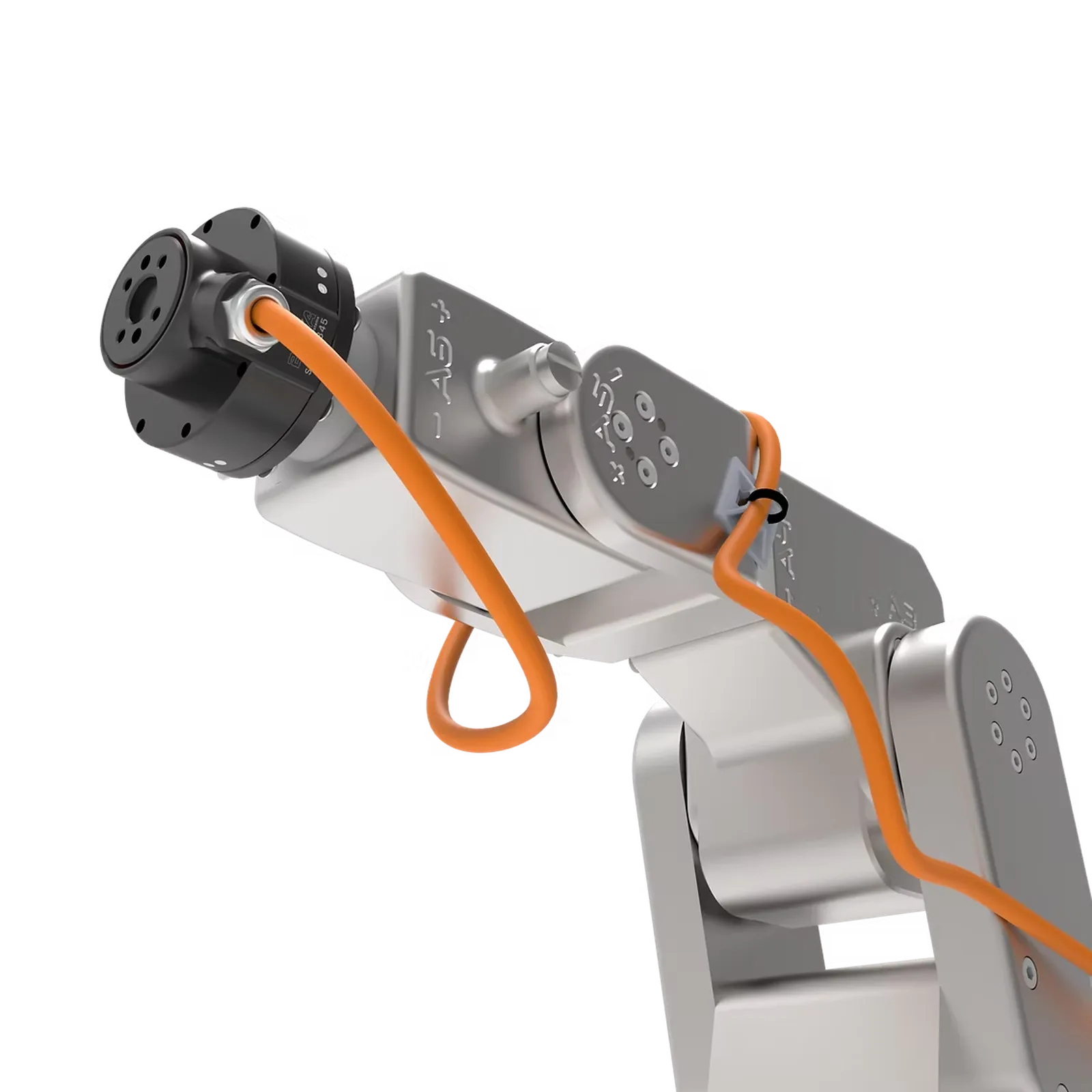
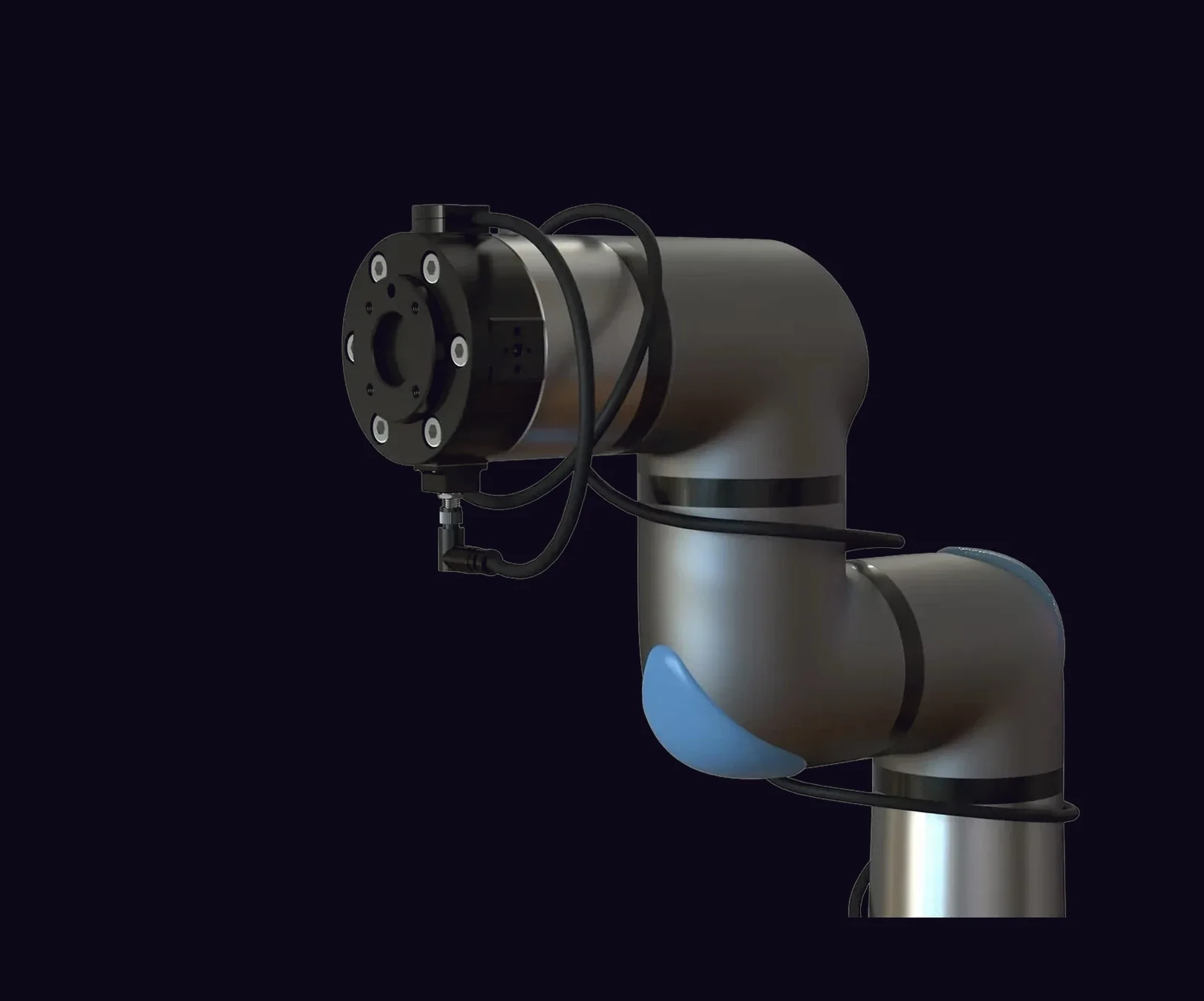
MegaONE
Heavy-duty 6-axis force-torque sensor.
The heavy hitter: 1.37 kg, force ranges up to 8,000 N, torque up to 180 Nm, at 0.55 N resolution. Built for the largest industrial robots from ABB, Stäubli, and KUKA, where payloads reach 120 kg and the sensor must survive heavy cyclic loads while still resolving sub-Newton forces.
SolidWorksFEAGD&TISO 9409+1