
Project
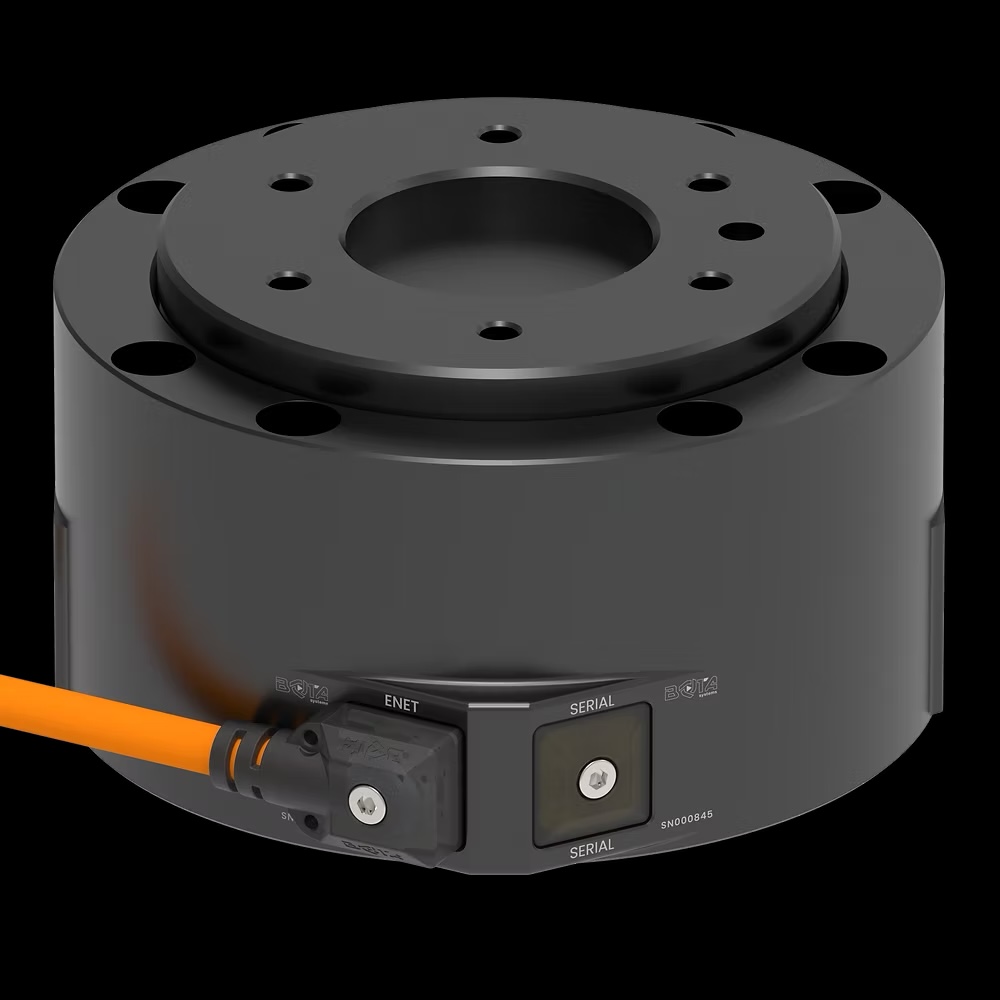
MegaONE
The heavy hitter: 1.37 kg, force ranges up to 8,000 N, torque up to 180 Nm, at 0.55 N resolution. Built for the largest industrial robots from ABB, Stäubli, and KUKA, where payloads reach 120 kg and the sensor must survive heavy cyclic loads while still resolving sub-Newton forces.
Product Design
Co-designed the MegaONE's sensing structure: a stiff body built to withstand 8,000 N overload and continuous cyclic loading while still resolving 0.55 N (EtherCAT). The core challenge was designing for stiffness and overload survival without losing measurement sensitivity.
Heavy-Duty Integration
ISO 9409-1-63-6-M6 mounting flange for direct integration with ABB, Stäubli, and KUKA heavy-payload robots handling up to 120 kg loads. The overload-protected geometry and high-cycle fatigue design let it survive continuous production use while still resolving sub-Newton forces under assembly tolerances.
8,000 N
Peak Force
180 Nm
Peak Torque
0.55 N
Resolution
Challenges
- Stiffness and sensitivity pull in opposite directions. A structure stiff enough for 8,000 N overload naturally suppresses the small deflections that produce a measurable signal at 0.55 N.
- The sensor faces high-cycle fatigue in continuous production use. The sensing geometry had to survive millions of load cycles without drift or degradation.
Outcomes
- Deployed in aerospace, construction, solar panel manufacturing, and heavy precision assembly, handling forces beyond the range of smaller sensors.
- Overload-protected sensing structure validated for millions of load cycles in continuous production use without drift or degradation.