
Project
Digital VerroTouch
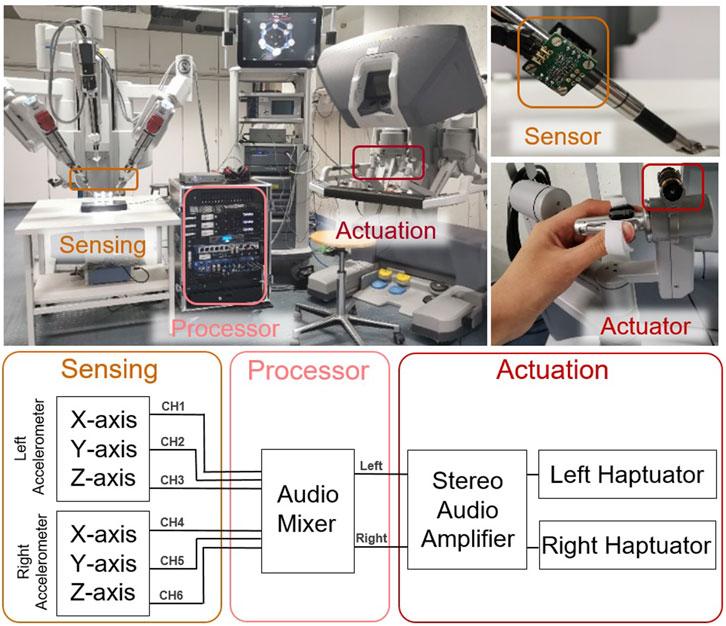
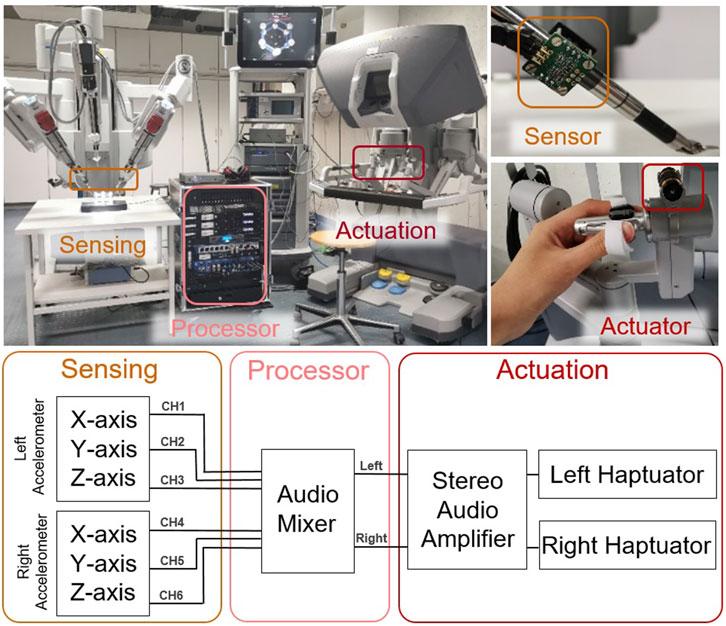
At the Max Planck Haptic Intelligence department under Prof. Katherine Kuchenbecker, I worked on VerroTouch: a system that captures tool-contact vibrations on da Vinci surgical robots and replays them on the surgeon's fingertips in real time. My mechanical redesign of the actuation hardware improved performance by ~250%. The work contributed to a peer-reviewed publication in 2024.
Actuation & Sensing Hardware
The system uses 3-axis MEMS accelerometers on robotic instrument arms to detect contact vibrations, and custom voice-coil actuators on the surgeon's console handles to replay them in real time. I redesigned the voice-coil actuator bracket to improve mechanical coupling, yielding a ~250% improvement in effective actuation performance: enough to move from a barely perceptible buzz to naturalistic tactile feedback usable during surgery.
Experimental Platform & AiroTouch
Built high-speed experimental rigs for system-dynamics characterisation: frequency response, latency, and fidelity of the vibrotactile rendering pipeline. This work fed into AiroTouch, a follow-up study published in Frontiers in Robotics and AI (2024) that showed vibrotactile feedback reduces applied forces and increases task realism during telerobotic assembly on da Vinci Si robots.
~250%
Actuation Improvement
2024
Peer-Reviewed Publication
Challenges
- Vibration fidelity is the core constraint: any mechanical artefact introduced between the accelerometer and the surgeon's fingertip distorts tactile perception and undermines the feedback's clinical value.
- The experimental rig had to capture system dynamics at kHz rates while staying flexible enough for rapid hardware iteration during a 3-month internship.
Outcomes
- ~250% improvement in effective actuation performance, making the feedback usable in real surgical training.
- Co-authored AiroTouch (Frontiers in Robotics and AI, 2024), showing that vibrotactile feedback reduces forces and improves realism in telerobotic assembly.